飛控Pixhawk 4 Mini與機載電腦Jetson Xavier NX串口通信及租賃方案解析
隨著無人機技術的快速發展,高效的飛控系統與強大的機載計算平臺之間的協同工作成為實現自主飛行、實時數據處理等高級功能的關鍵。其中,Pixhawk 4 Mini作為一款輕量級、高性能的開源飛控硬件,與NVIDIA Jetson Xavier NX這款適用于邊緣AI計算的機載電腦的結合,為無人機應用提供了強大的硬件基礎。實現兩者間的穩定串口通信,是構建智能無人機系統的核心步驟之一。對于研發測試、短期項目或初創團隊而言,采用計算機及通訊設備租賃模式,可以顯著降低初始投入成本,提高資源利用效率。
一、硬件概述與通信基礎
Pixhawk 4 Mini是基于PX4開源飛控軟件的自動駕駛儀,體積小巧,適用于中小型無人機平臺。它通過串口(UART)接口與外部設備通信,發送飛行狀態數據(如姿態、位置、速度)并接收來自機載電腦的控制指令。Jetson Xavier NX則是一款模塊化AI超級計算機,具備強大的GPU和CPU性能,能夠運行復雜的計算機視覺、傳感器融合和自主決策算法。為實現通信,通常需要將Pixhawk 4 Mini的TELEM2串口(或其他可用串口)通過電平轉換模塊(如3.3V/5V轉換)連接到Jetson Xavier NX的UART引腳(例如,Jetson Xavier NX的J21引腳排針上的UART接口),確保物理連接穩定。
二、串口通信配置與軟件實現
在軟件層面,首先需在Jetson Xavier NX上安裝Ubuntu操作系統及ROS(機器人操作系統),以簡化開發流程。接著,通過配置串口參數(如波特率,通常設置為921600或57600以匹配PX4默認設置),建立通信鏈路。在ROS中,可以使用MAVROS包作為中間件,將Pixhawk的MAVLink協議數據轉換為ROS話題,從而方便地在Jetson上讀取飛行數據或發送指令。例如,通過訂閱/mavros/imu/data話題獲取IMU數據,或發布到/mavros/setpoint_raw/local話題發送控制命令。還需注意權限設置(如將用戶添加到dialout組)和端口穩定性處理,避免通信中斷。
三、通信流程與數據交換
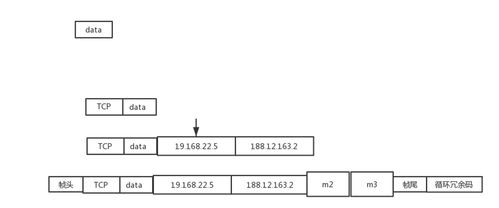
典型的數據交換流程包括:Pixhawk 4 Mini通過串口實時發送MAVLink消息(如心跳包、傳感器數據)到Jetson Xavier NX;Jetson接收并解析這些數據,用于運行自主導航、目標檢測等算法;然后,Jetson生成控制指令,封裝為MAVLink消息后通過串口回傳至Pixhawk,由飛控執行具體飛行動作。這一閉環實現了從感知到決策的完整鏈條,適用于航拍測繪、物流配送、巡檢等場景。為確保可靠性,建議實施錯誤檢測和重連機制,例如使用看門狗定時器監控串口連接狀態。
四、計算機及通訊設備租賃優勢
在項目初期或測試階段,直接采購Pixhawk 4 Mini、Jetson Xavier NX及相關通訊設備(如串口轉換器、連接線纜)可能帶來較高的資金壓力。此時,租賃成為一種靈活且經濟的解決方案。通過專業租賃服務,團隊可以:
1. 降低成本:只需支付相對較低的月租或項目租費,避免大額資本支出,尤其適合短期實驗或演示項目。
2. 快速部署:租賃公司通常提供預配置的硬件套件,減少環境搭建時間,加速開發進程。
3. 技術更新:無人機和計算技術迭代迅速,租賃便于隨時升級到最新設備,保持技術前沿性。
4. 維護支持:許多租賃服務包含技術支持和保修,降低設備故障帶來的風險。
租賃時,應選擇信譽良好的供應商,明確設備型號、租賃期限、損壞責任等條款,并確保設備兼容性(例如,確認串口接口和線纜適配)。
五、應用場景與
結合Pixhawk 4 Mini與Jetson Xavier NX的串口通信系統,在農業監測、緊急救援、智能交通等領域具有廣闊前景。通過租賃模式,企業和研究機構可以更靈活地開展原型開發,驗證概念后再決定是否大規模投入。實現穩定串口通信是技術核心,而合理利用租賃資源則能優化項目管理和成本控制,推動無人機創新應用的快速落地。隨著5G和物聯網技術的發展,這種軟硬件結合方案將進一步增強無人機的自主性和智能化水平。
如若轉載,請注明出處:http://www.gaorenwang.com/product/28.html
更新時間:2026-05-11 21:33:17